


Robots en autonome systemen (RAS) worden steeds belangrijker binnen defensie. Samen met bijvoorbeeld artificial intelligence en kwantum technologie worden robotische systemen gezien als disruptieve technologie dat in grote mate bepalend zal zijn voor het toekomstige optreden. Zo belangrijk is de komst van RAS zelfs dat binnen de Nederlandse defensie er een aparte eenheid voor is opgericht. Deze RAS-cell werkt vanuit de kazerne van 13 Lichte Brigade in Oirschot maar werkt voor heel de krijgsmacht. Hun focus ligt bij zogenoemde UGV’s (unmanned ground vehicles) en alle zich ontwikkelende technologie daaromtrent.

Daarnaast is er ook een RAS-peloton gecreëerd binnen 42 Pantserinfanteriebataljon Limburgse Jagers. Dit peloton test in een samenspel met de RAS-cell en de industrie diverse bestaande systemen in het veld om te kijken hoe die operationeel ingezet kunnen worden. Op dit moment werken ze onder meer met de Milrem Robotics Tracked Hybrid Modular Infantry System (THeMIS) en de Rheinmetall Mission Master Cargo. Echter, kolonel Doense, commandant van de RAS-cell en commandant Future Manoeuvre Element (FME) zei het onlangs in een gesprek met ons: “Wat we nu verzinnen is niet wat het over vijftien jaar gaat worden. Je moet het kader bijhouden en herdefiniëren. Militairen willen graag iedere onzekerheid wegplannen. Daar moet je soms een beetje afstand van nemen. Innovatie zit in je hoofd en staat niet hier in de werkplaats.”

Waar de Mission Master Cargo voornamelijk een logistiek hulpmiddel op wielen is, beschikt de THeMis over rupsbanden. Van vracht tot bewapening, er kan al veel met de veelzijdige THeMIS maar het potentieel van UGV’s wordt nog maar ten dele benut. Dat beseft ook de RAS-cell die ook het beproeven van andere systemen overweegt. Van de Mission Master is er intussen een cargo-exemplaar in gebruik bij het RAS-peloton. Van de THeMIS heeft het peloton er inmiddels zeven tot haar beschikking. Het is de bedoeling dat het RAS-peloton in 2022 met de Milrem THeMIS gaat deelnemen aan de eFP missie (enhanced Forward Presence) in Litouwen.

Testen
Nederland is niet het enige land dat volop bezig is met RAS. Ook in naburige landen zoals Duitsland, Frankrijk en Groot Brittannië zijn soortgelijke programma’s opgestart evenals in Israel. Naast recent bijvoorbeeld Duitsland beproeft ook het Britse leger zo onder andere de Roboteam/Elbit Systems Probot UGV. Deze laatste doet dat in het Remote Patrol Vehicle (RPV) Experimentation programma. Van Elbit Systems is bekend dat het ook voornemens is de Probot in Nederland te demonstreren maar de komst van COVID gooide tot op heden roet in het eten. De Probot heeft niet alleen wielen maar ook speciale rupsbanden die in het veld om diezelfde wielen kunnen worden gelegd om zo de terreinwaardigheid te optimaliseren. Net als de THeMIS en de Mission Master kan de Probot voor een verscheidenheid aan taken worden ingezet, variërend van transport tot bewapende verkenning. Echter, de opzet van Spiral 1 van de Britse tests is wel iets anders. Waar de Britten net als de Duitsers in eerste instantie kijken naar transport en logistieke voordelen (thema ‘supply”), is Nederland bezig om alle facetten van UGV’s in het landoptreden te beproeven, in het bijzonder de thema’s “sense” en “engage”. Intussen zet het Israelische leger de UGV van Elbit Systems al geruime tijd daadwerkelijk breed operationeel in. Ook hier passend in het streven naar meer informatiegestuurd optreden, heeft dit leger er ruim 100 in de bewapening inclusief een aantal dat in gebruik is bij de voor multidomain operations geoptimaliseerde “Ghost” eenheid. Een goed moment om de drie systemen eens nader te bekijken.

Payload
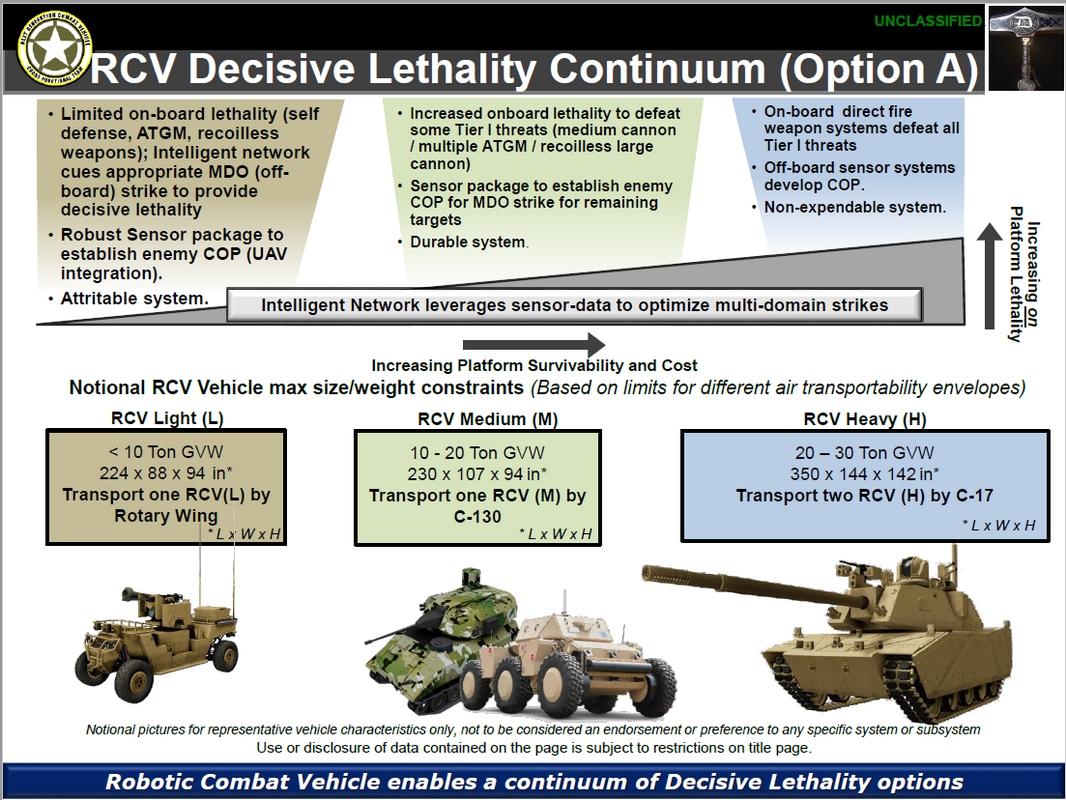
De Mission Master cargo is verreweg de grootste van de drie met een lengte van bijna drie meter en een breedte 1,55 meter, met bagagerekken 2,5 meter. Toch is deze met zijn gewicht van net 1100 kilo niet de zwaarste van de drie. Dat is de THeMIS met zo’n 1600 kilo. De zware rupsbandconstructie neemt het grootste deel van dit gewicht voor zijn rekening. Hij is wel een halve meter korter. De Probot is net onder de twee meter en ook het smalst. Met zijn 435 kilo (of 500 kg met tracks) is de Probot een heel stuk lichter dan zijn concurrenten. Ook qua laadgewicht zijn er verschillen. Van 600 kilo voor de Mission Master tot een gezien zijn voertuiggewicht formidabele 750 kilo voor de Probot. Het zal niet verbazen dat de zwaarste van het stel, de THeMIS, tot wel 1200 kg kan torsen, aldus gegevens van de fabrikant. Elke fabrikant heeft zo zijn eigen idee wat het ideale UGV instapmodel zou moeten zijn. Echter, Elbit Systems biedt intussen een grotere 6×6 versie van de Probot omdat het bedrijf van mening is dat er keuze moet zijn om zo het juiste voertuig in te zetten in verschillende missies. Mogelijk ontstaat er zo uiteindelijk een familie van systemen, enigszins naar gelijkenis met het Amerikaanse Robotic Combat Vehicle (RCV) programma dat een onderscheid maakt in respectievelijk Light (minder dan 10 ton, “attritable”), Medium (10-20 ton, “durable”) en Heavy (20-30 ton, “non-expendable”) onbemande voertuigen. In dit licht moet ook de recente onthulling van Milrem’s zwaardere Type X (12 ton) worden gezien.
Autonoom
Maar hardware is maar een onderdeel. UGV’s en alle andere soorten robotica staan allang niet meer op zichzelf. Veel belangrijker is hoe alle voertuigen, drones, sensoren en zelfs militairen een aanvulling kunnen zijn op elkaar. En dan niet alleen als hulpmiddel maar als onderdeel van een netwerk dat door informatie gedreven is. Dat is belangrijk als de nummer een drijfveer voor de inzet van UGV’s is het verminderen van het aantal militairen dat zich aan gevaar moet blootstellen. Andere belangrijke drijfveren zijn het verhogen van de slagkracht en het bereiken van meer resultaten met kleine eenheden. Het gaat dus verder dan het vervoeren van uitrusting of wapensystemen voor een groep militairen. De UGV’z zullen zich uiteindelijk autonoom moeten kunnen bewegen door het terrein en de data die de meegevoerde sensoren verzamelen gebruiken en doorzetten naar hogere commando-niveaus. Ook zullen ze door gebruik te maken van de sensoren, eventuele bewapening zelfstandig missies moeten kunnen uitvoeren die ze via het C2 netwerk toebedeeld krijgen.

Open architecture
De UGV’s hebben hun eigen ingebouwde sensoren om van afstand bediend te kunnen worden, camera’s rondom zorgen dat een operator de omgeving kan zien. Gezien het toenemend belang van autonomie zijn kleine radars en/of optische sensoren ingebouwd die ervoor zorgen dat de UGV obstakels kan waarnemen, ontwijken of automatisch iemand kan volgen, de zogenaamde ‘follow me” functie. Maar soms vereist een missie dat er zelfstandig door het voertuig moet worden opgetreden bijvoorbeeld omdat het ingezet wordt voor een (gewapende) verkenningsmissie. Dan is het handig als er andere sensoren of modules aangesloten kunnen worden. Alle drie de UGV’s hebben software die met een zogenoemde open architectuur is gebouwd. De aanvullende missie systemen worden op de UGV aangesloten door middel van een standaard aansluiting en kunnen dan communiceren met de besturingssoftware en het netwerk.

Genetwerkt
Network Centric Operations is zo een beetje het toverwoord. In het netwerk zijn alle niveaus en middelen verbonden en is alle informatie te delen met alles en iedereen, ook wanneer het gebruik van het elektromagnetisch spectrum mogelijk betwist wordt. Milrem is als relatieve nieuwkomer in de defensie-industrie primair een bouwer en ontwerper van UGV’s met de THeMIS tot op heden als succesnummer. Aangezien ze een klein bedrijf zijn moeten hun producten geïntegreerd worden in allerlei door anderen geleverde C2 netwerken met eveneens gebruikmaking van communicatie apparatuur van andere leveranciers. De andere twee kunnen dat uiteraard ook. Echter, hun UGV’s werken nog beter met gebruikmaking van de bedrijfs-eigen C2 netwerken. Rheinmetall gebruikt daarvoor het PATH-A besturingssysteem dat ook connectiviteit garandeert met het eigen soldaat-systeem en de eigen Command & Control software. Elbit Systems gebruikt TORCH-X-RAS, onderdeel van de TORCH-X familie van genetwerkte systemen. Speciaal ontwikkeld voor de aansturing van robots en autonome systemen die zowel in de lucht als op de grond opereren, staat TORCH-X RAS volledige interoperabiliteit toe, aldus Elbit Systems. Dit stelt RAS in staat, als onderdeel van een groter verband, succesvol “manned-unmanned teaming” toe te passen. Voor Nederland is dit alles mogelijk interessant omdat Elbit Systems in het VOSS project (Verbetered Operationeel Soldaat Systeem) al het TORCH-X command & control systeem voor uitgestegen militairen levert. Net als bij Rheinmetall, kennen alle TORCH-systemen van Elbit Systems onderling een hoge mate van connectiviteit. Ze zijn immers ontworpen om samen te werken en in het geval van Elbit Systems ook operationeel beproefd. Maar deze RAS C2 apparatuur is ook platform agnostisch wat wil zeggen dat het ook op andere, niet Elbit-eigen platforms kan worden ingezet.

Kunstmatige Intelligentie
Er zijn verschillende manieren om de UGV’s te besturen. De simpelste is door een operator met een afstandsbediening en gebruik makend van line-of-sight of de camera’s in het voertuig. De drie UGV’s kunnen ook semi-autonoom een persoon of ander voertuig zelfstandig volgen. Daarbij houdt houdt de persoon of bestuurder rekening met eventuele obstakels. Ze kunnen ook allemaal op een voorgeprogrammeerde route worden gestuurd om van A naar B te gaan. Zolang dat op normale wegen gebeurd is dat niet zo spannend. Het wordt pas ingewikkeld als de UGV’s buiten de gebaande paden moeten navigeren. Daar veranderen de condities continue en krijgen ze te maken met onvoorziene obstakels en condities. Het is onmogelijk om elke keer de hele omgeving vooraf in kaart te brengen en die in de systemen in te brengen. In het voorbeeld van de Probot gebruikt Elbit Systems kunstmatige intelligentie en machine-learning om de UGV zelfstandig een oplossing te laten zoeken. Uiteindelijk moet zo volledige autonomie gefaciliteerd worden, althans onder enige vorm van menselijke supervisie. Het gebruikt daarvoor de Elbit-eigen mapping engine gekoppeld met kunstmatige intelligentietools waardoor de Probot zijn omgeving en het terrein ‘begrijpt’.
Innovatie
Robots en onbemande (autonome) systemen zijn niet meer weg te denken uit het militaire domein. De mogelijkheden die deze systemen bieden zijn enorm. Van het vergroten van de oppervlakte aan gebieden dat zo verkend kan worden tot het verhogen van het aantal tegenstanders dat succesvol aangegrepen kan worden. Kortom, “robots are here to stay”. Gezien de vraag groeit dan ook de industrie in dit vakgebied. Van de grote, gevestigde defensiebedrijven tot gedreven start-ups, allemaal werken ze hard aan deze toekomst. Het is daarom goed dat Defensie daar grondig onderzoek naar doet met de RAS-cell en het RAS-peloton, in samenwerking met de industrie, een aanpak die internationaal met bewondering wordt gadegeslagen, ondermeer door bijvoorbeeld het European Defence Agency dat inmiddels zijn eigen multinationale UGV projecten kent.








Leave a Reply